(씨넷코리아=윤현종 기자) 엔비디아가 2022년 로스콘(ROSCon)에서 최신 아이작(Isaac) 로봇운영체제(ROS) 소프트웨어 릴리스인 개발자 프리뷰(DP) 2를 발표했다고 24일 밝혔다.
이번 릴리스에는 ROS 2 개발자를 위한 추가 기능을 비롯하여 자율 이동 로봇(AMR) 플릿을 위한 새로운 클라우드와 엣지 투 로봇(edge-to-robot) 작업 관리, 모니터링 소프트웨어가 포함됐다.
엔비디아 아이작 ROS는 하드웨어 가속 성능을 위한 개별 패키지(GEM)와 전체 파이프라인(NITROS)으로 구성된다.
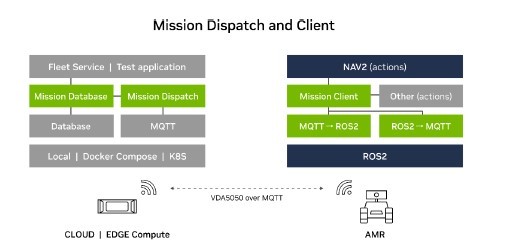
이번 업데이트에는 성능 향상 외 ▲미션 디스패치와 클라이언트(Mission Dispatch and Client) ▲프리스페이스 세그멘테이션(FreeSpace Segmentation) 분할 ▲H.264 비디오 인코딩과 디코딩 등이 추가됐다.
미션 디스패치 경우 NGC에서 다운로드하거나 아이작 깃허브(Isaac GitHub)에서 소스 코드로 사용할 수 있는 컨테이너형 마이크로서비스로 차량 관리 시스템에 통합될 수 있다. 미션 디스패치는 오토 모터스(OTTO Motors)와 인오빗(InOrbit)이 개발하여 최근 발표한 VDA5050 커넥터와 같은 다른 오픈 소스 ROS 2 클라이언트와 상호 운용성을 갖는 것으로 확인됐다.
ROS 2 험블(Humble)과 호환되는 미션 클라이언트는 아이작 ROS 깃허브에서 패키지로 제공되며, Nav2 내비게이션 스택과 사전 통합되어 로봇에서 탐색 및 기타 작업을 할당하고 추적한다.
라이언 가리피(Ryan Gariepy) 오토 모터스 CTO는 "현실 세계에서 모바일 로봇의 배포가 가속화됨에 따라 상호 운용성이 점점 중요해지고 있다. VDA5050과 ROS2를 오픈소스 커뮤니티로 연결하면 로봇 제조사가 차별화에 집중할 수 있는 동시에 차량 관리 솔루션의 혁신을 촉진할 수 있을 것이다”라고 말했다.
한편, 엔비디아는 ROS 2 개발자를 위한 무료 웨비나를 선보인다. 11월 14일부터 12월까지 세 차례 걸쳐 진행되는 본 세션은 아이작 ROS 웨비나 시리즈 홈페이지에서 등록을 접수받으며 자세한 내용도 참고하면 된다.